概述
海洋系统部门不仅拥有独立开发适用于船舶用及军舰的水中装备等的技术力,而且率先领导最佳 Marine Communication & Control System及Underwater System的开发。
除此之外,该部门正在开发装载于船舶的自动化控制系统和利用海洋资源和海洋能量的海洋开发相关系统。
- Semi Autonomous Underwater Vehicle(SAUV)
- Unmanned Underwater Vehicle(UUV)
- Mine Disposal Vehicle(MDV)
- Hybrid – Remotely Operated Vehicle(H-ROV)
- SEA ROVER R100
- SEA ROVER A100
SAUV
Semi Autonomous Underwater Vehicle
SAUV作为由科学技术部主管的国策课题项目,从1998年到2003年经5年开发而制成,使用于海底探测及水雷去除等多种领域,我们通过此装备的开发对全量靠进口的该产品实现了国产化,获得了替代进口的效果。
UUV
Unmanned Underwater Vehicle, 无人潜水艇
UUV6000为深海无人潜水艇,可探测全海洋的95%以上。该装备是在超高压、黑暗等人类无法直接进行工作的深海等环境下,利用机器人手臂来进行工作的机器人系统。
自2006年起进行了东海、太平洋等深海底的海洋资源调查,使我国发展成为世界第四位6,000m级深海潜水艇保有国等,达到了优秀的科技成果。
结构

Haenubi
- 支持HAEMIRAE的水中作业
- 维持HAEMIRAE的船首方位
- 深海摄像机功能

Haemirae

船舱控制室
目前我们正在开发自主式移动机器人(Autonomous Underwater Vehicle)。自主式移动机器人可提供深海自由航海及长途探测功能,并且可通过水中进水装置和音响进行通讯。
MDV
Mine Disposal Vehicle, 自主导航排雷机器人
自主导航排雷机器人装载有多波束声呐及提高潮流克服能力的高功能推进系统,与既有无人水雷处理器相比,本装备大幅提高了作战功能。
尤其,本产品是嫁接自动控制技术而容易接近目标物,且具有自主式航海功能,发生事故时可灵活对应的最尖端设备,在扫水雷作业环境恶劣的韩半岛邻近海域也可有效进行扫水雷作业。
H-ROV的说明和结构指南
H-ROV(Hybrid-Remotely Operated Vehicle,复合-远程控制潜水艇)
H-ROV是可以运用水中的精密自律航法/控制的船体检查自动化系统即远程控制潜水艇。
结 构
- 自动控制技术
- 通过传感器融合的搜索
- 精密的姿式控制技术

主功能
- 六自由度姿式控制
- 维持控制(航向、水深、高度)
- 通过光通信的远程精密控制
- 使用USBL的位置推测
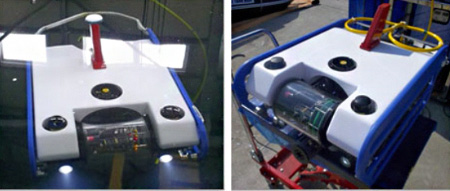
Sea Rover R 100
S海孚R100是一款可以下潜水下100米,进行水下勘探,海底地形勘察,生态环境信息并通过光缆通信实现监测而开发的水下无人潜水艇。
主要组成
- 水下摄像头,声纳,环境传感器
- 自动动态控制
- 混合型水下导航算法
- 有线通信系统
Sea Rover A 100
海孚A100是一款可以下潜水下100米,进行水下勘探,海底地形勘察,生态环境信息并通过超声波实现监测而开发的自由水下无人潜水艇。
主要组成
